Source: The Conversation – in French – By Thierry Colin, Professeur des universités en Sciences de gestion, Université de Lorraine

Les robots collaboratifs, ou cobots, ne remplacent pas seulement les humains : ils peuvent travaillent avec eux. Quel est leur impact sur la division du travail ?
Les robots sont omniprésents dans la production industrielle. Leur diffusion a toujours été au cœur d’enjeux humains, sociaux, économiques et en management, entraînant très tôt de nombreux questionnements.
Une nouvelle interrogation émerge aujourd’hui avec l’apparition des cobots. Capables de travailler non seulement à la place, mais aussi avec les humains au sein des ateliers, les robots collaboratifs sont-ils en train de devenir des collègues comme les autres ? Légers, flexibles, relativement accessibles et conviviaux… sont-ils susceptibles de remettre en cause les codes de la division du travail ?
Nos recherches récentes, basées sur des études de cas comprenant des entretiens et des observations en situation, ont permis de repérer quatre types d’usage des cobots : configuration simultanée, alternée, flexible ou coexistence. Elles rentrent dans le cadre du projet Impact « C-Shift » (Cobots in the Service of Human activity at work) qui vise à étudier l’impact de la mise en œuvre de dispositifs collaboratifs intelligents tels que les cobots dans le cadre des défis de l’industrie du futur.
Qu’est-ce qu’un cobot ?
Le terme cobot est créé par la contraction des termes anglais « collaborative » et « robot ». La paternité en est attribuée à des universitaires états-uniennes qui cherchent à la fois à limiter les troubles musculosquelettiques et à améliorer la productivité dans des usines de production automobile – Ford et General Motors.
Un robot collaboratif est un robot qui peut être installé dans le même espace de travail que les opérateurs humains, sans barrière de protection physique. Ils sont équipés de capteurs et de programmes déclenchant un ralentissement du mouvement ou un arrêt complet si un risque de collision est détecté. Ils sont capables de réaliser la plupart des opérations industrielles – visser, percer, poncer, souder.
Les cobots ne sont pas conçus pour des usages prédéfinis. Ils sont caractérisés avant tout par leur flexibilité. Facilement programmables grâce à des interfaces accessibles sur des tablettes, ils sont faciles à déplacer. Ils peuvent aussi bien mettre des produits cosmétiques dans des cartons, que faire du contrôle qualité à l’aide d’une caméra en bout de chaîne de production ou souder des pièces métalliques.
Marché multiplié par quatre d’ici 2030
Les cobots ne sont plus de simples prototypes de laboratoire. Ils sont désormais couramment utilisés dans des usines de toutes tailles et dans divers secteurs – automobile, logistique, santé, agroalimentaire –, bien que leur adoption reste encore loin d’être généralisée. La part des cobots dans les ventes mondiales de robots serait de l’ordre de 3 % et, selon ABI research, le marché des cobots pourrait être multiplié par quatre d’ici 2030.
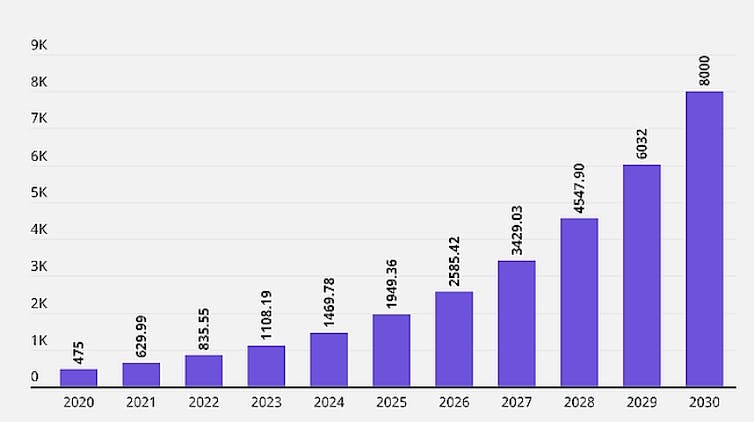
Statista et ABI Research, FAL
Les cobots ne visent pas à remplacer les robots traditionnels en raison de plusieurs limitations :
-
Leur charge utile est réduite : leur légèreté et leur petite taille les empêchent de manipuler des objets lourds.
-
Leur vitesse d’exécution est volontairement limitée pour garantir la sécurité des humains qui travaillent autour. Cela freine leur productivité et les rend peu adaptés aux productions à très grande échelle.
-
Installés dans les mêmes espaces que les humains, les cobots soulèvent des problèmes de sécurité lorsqu’ils sont équipés d’outils dangereux – outil coupant ou torche de soudage.
Leur potentiel réside avant tout dans de nouveaux usages et une approche différente de l’automatisation. Ainsi, dans une PME spécialisée dans la tôlerie qui a fait l’objet d’une étude de cas, les soudures sont effectuées par un robot de soudure traditionnel pour les grandes séries récurrentes. Pour les séries de taille moyenne et par des soudeurs pour les petites séries ou des soudures trop complexes, elles sont effectuées par des cobots.
Quatre usages des cobots en usine
Si par définition les cobots ont la possibilité de travailler dans le même espace que des opérateurs humains, leurs usages ne sont pas nécessairement collaboratifs et nos recherches nous ont permis de distinguer quatre configurations.

Université de Lorraine, Fourni par l’auteur
Coexistence avec l’humain
À un extrême, les cobots viennent se substituer aux opérateurs pour prendre en charge les gestes les plus pénibles et/ou gagner en productivité. On qualifie cet usage de coexistence, car il n’y a aucune interaction directe avec les humains.
Dans l’industrie automobile, des cobots vissent des pièces sous les véhicules, là où les positions sont particulièrement difficiles pour les opérateurs.
À lire aussi :
Comment rendre les robots plus adaptables aux besoins de leurs collaborateurs humains ?
Configuration simultanée
Dans la configuration simultanée, cobots et opérateurs travaillent ensemble en adaptant mutuellement leurs mouvements, côte à côte ou face à face. Si cette configuration est largement réalisable en laboratoire, elle est assez rare en condition réelle. La raison : le temps nécessaire à sa mise au point et sa certification sécurité obligatoire.
Chez un équipementier, le cobot positionne une colonne de direction pour automobile avec précision, évitant le port de charges et les chocs, et l’opérateur effectue des tâches de vissage sur la pièce.
Configuration alternée
La configuration alternée correspond à une situation où l’opérateur utilise le cobot, mais n’interagit pas directement avec lui. Il le programme pour une série de tâches, et le laisse travailler seul, dans un espace différent. Cette configuration garantit une meilleure sécurité pour l’opérateur humain. Ce dernier optimise la répartition du travail entre ce qu’il confie au cobot et ce qu’il continue de faire lui-même.
Chez un fabricant d’échangeurs thermiques pour la production de gaz industriels, les soudeurs délèguent aux cobots les soudures les plus simples et se concentrent sur des soudures plus complexes ou moins répétitives.
Configuration flexible
Dans la configuration flexible, la répartition du travail entre humains et cobots évolue au cours du temps, en fonction du plan de charge. Une fois la technologie maîtrisée, les cobots peuvent être réaffectés à différentes activités en fonction des exigences du moment. Le même cobot peut être utilisé pendant une période pour une activité de chargement de machines, puis réoutillé, il peut servir pour du ponçage, puis des opérations de peinture, etc.
L’efficacité réside dans la capacité des opérateurs, des techniciens et des ingénieurs à travailler ensemble pour inventer constamment de nouveaux usages. Cette configuration semble particulièrement adaptée à des PME dans lesquelles les séries sont courtes et variables.
Cobots et IA
Les cobots font partie d’un vaste mouvement technologique. Le contexte de l’industrie 5.0 et l’utilisation croissante de l’IA permettront aux cobots d’être encore plus adaptables, voire capables d’improvisation. Ils pourront être intégrés dans des « systèmes cyberphysiques de production », c’est-à-dire des systèmes très intégrés dans lesquels l’informatique contrôle directement les outils de production.
Cette intégration n’est pas évidente à ce stade. Si elle est possible, on peut penser que c’est la capacité à « combler les trous » de l’automatisation traditionnelle qui sera dominante, reléguant la flexibilité et l’aspect collaboratif au second plan. Inversement, le recours à l’intelligence artificielle peut aider au développement de configuration flexible misant sur la collaboration au sein des collectifs de travail.
Si ces évolutions technologiques ouvrent de nombreux possibles, elles laissent ouverte la question des usages en contexte réel. Les tendances futures dépendront des choix qui seront faits en termes de division du travail et de compétences.
Les configurations dites coexistence et activité simultanée ont finalement peu d’implications sur l’évolution des compétences ou de modalités de collaboration entre ingénieurs, techniciens et opérateurs. À l’inverse, le choix des configurations flexible ou activité alternée suppose que les opérateurs développent de nouvelles compétences, notamment en programmation, et que de nouvelles formes de collaboration verticales se développent.
En d’autres termes, les cobots redistribuent moins les cartes en matière de collaboration homme-machine qu’ils n’invitent à revoir les logiques de collaborations entre humains au sein des organisations.
![]()
Thierry Colin a bénéficié d’une aide de l’Initiative d’Excellence Lorraine (LUE) au titre du programme France 2030, portant la référence ANR-15-IDEX-04-LUE. Il a aussi bénéficié d’une aide de l’ANACT dans le cadre de son AMI “Prospective pour accompagner la transition des systèmes de travail”
Benoît Grasser a bénéficié d’une aide de l’Initiative d’Excellence Lorraine (LUE) au titre du programme France 2030, portant la référence ANR-15-IDEX-04-LUE. Il a aussi bénéficié d’une aide de l’ANACT dans le cadre de son AMI « Prospective pour accompagner la transition des systèmes de travail ».
– ref. Les robots collaboratifs, des collègues de travail comme les autres ? – https://theconversation.com/les-robots-collaboratifs-des-collegues-de-travail-comme-les-autres-260231